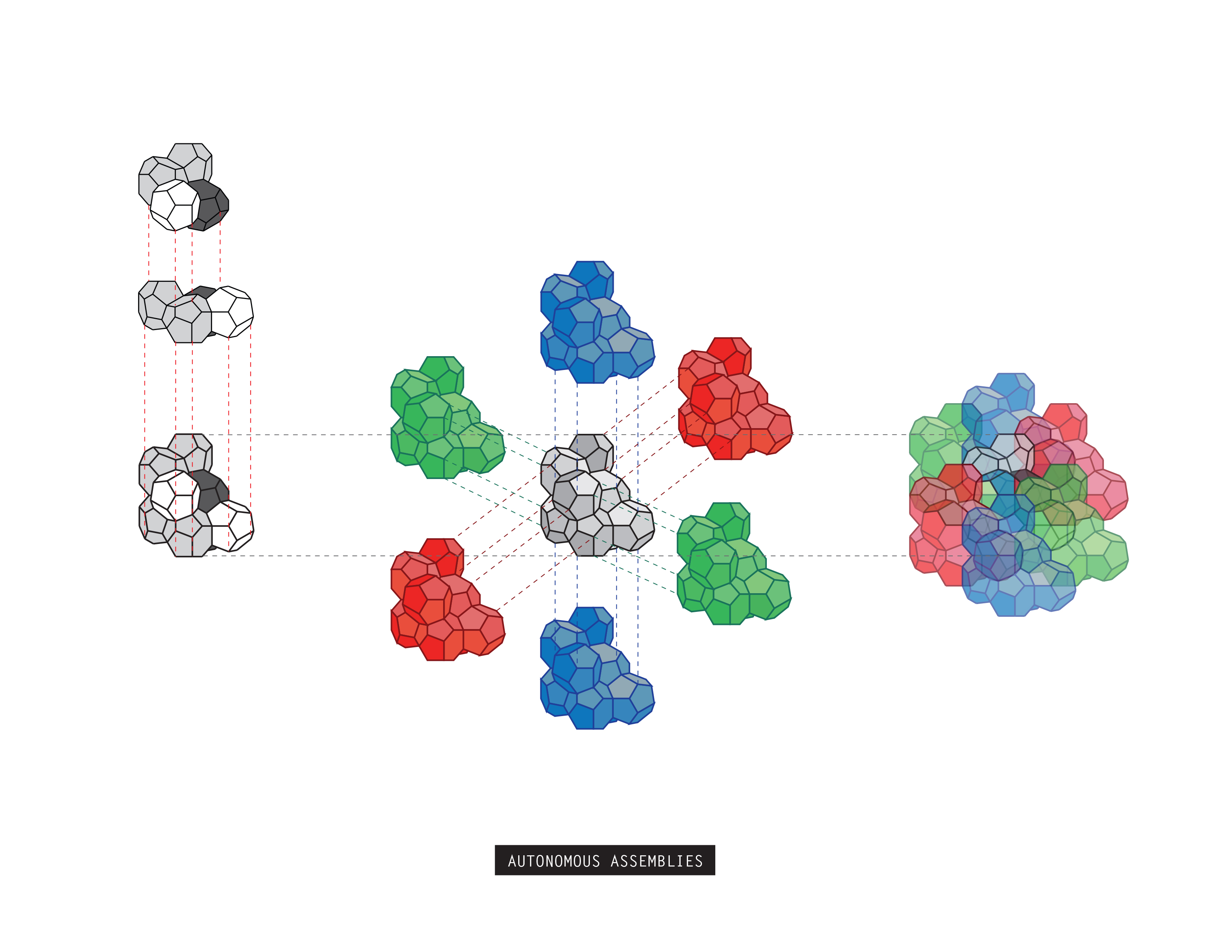
Autonomous Assemblies
Project Description
As disciplinary boundaries begin to shift and converge, distinctions between the fields of design and construction are blurred in conjunction with technological advancements. Digital technologies have been the subject of many explorations that resulted in strategies that promote efficiency, economic feasibility, and performance. Taking into account the advantages of digital computation and systems thinking, Autonomous Assemblies is an investigation into self-assembling systems and geometric packing. By exploring structural assemblies as a self-guided formation, varying factors such as environmental conditions play a determinant role in establishing a ruleset of design parameters. As a result, discrepancies between design intent and construction are dissolved to physical materials that are integral to the design process. Autonomous Assemblies is a representational model experimenting with micro-level building blocks at an operable scale (through rapid prototyping). Single modules are developed as building blocks to produce a larger ordered structure, and individual units are established to carry an embedded logic. The macro level structure creates calculated movements through local interactions and explores geometry as a framework to produce a system that reflects encoded information. This system creates a communication network derived from the internal logic based information to form coherent assemblies that are characterized by innovative and explorative methods that result in interconnected design, construction, and technology solutions.
Although experimental technologies and computational methods such as robotic construction and digital simulations have afforded unprecedented capabilities to realize complex designs, we are still faced with the challenges of predictability, control, and authorship. While active self-assembly methods require materials to undergo specific property changes, this project focuses on passive self-assembly techniques to challenge form-finding behavior. Looking to biological precedents such as stigmergic collaboration and swarm intelligence, the issue of approximation and uncertain outcomes remain. Hence, the physical geometry of individual units is used as an opportunity to introduce modular control. Unlike robotic construction where local interactions and material properties are physically stable, automation for assembly is not centralized and is instead reliant on an algorithmic approach – where an intrinsic logic to micro-level units can be tuned and authored to affect the macro-level outcome. This enables system components to interact based on a subsystem rooted in spatial boundaries and polygonal alignment. Autonomous Assemblies is an ongoing research model for atypical construction processes - taking a speculative discourse on the application of self-assembly in the fields of materials and construction. In addition to examining logic systems and geometry, formation methods that question ways of equilibrating aggregations can lead to the development of increasingly robust systems for inquiry and assembly. As we look towards information-based approaches to manipulate resultant transformations, behavioral characteristics are undoubtedly shaped by both internal tendencies of individual units and external reactions of the overall assembly to environmental conditions.