You are now in the main content area
Perpetual Operation System— Rubber Duck
Programming play in industrial spaces
Project Description
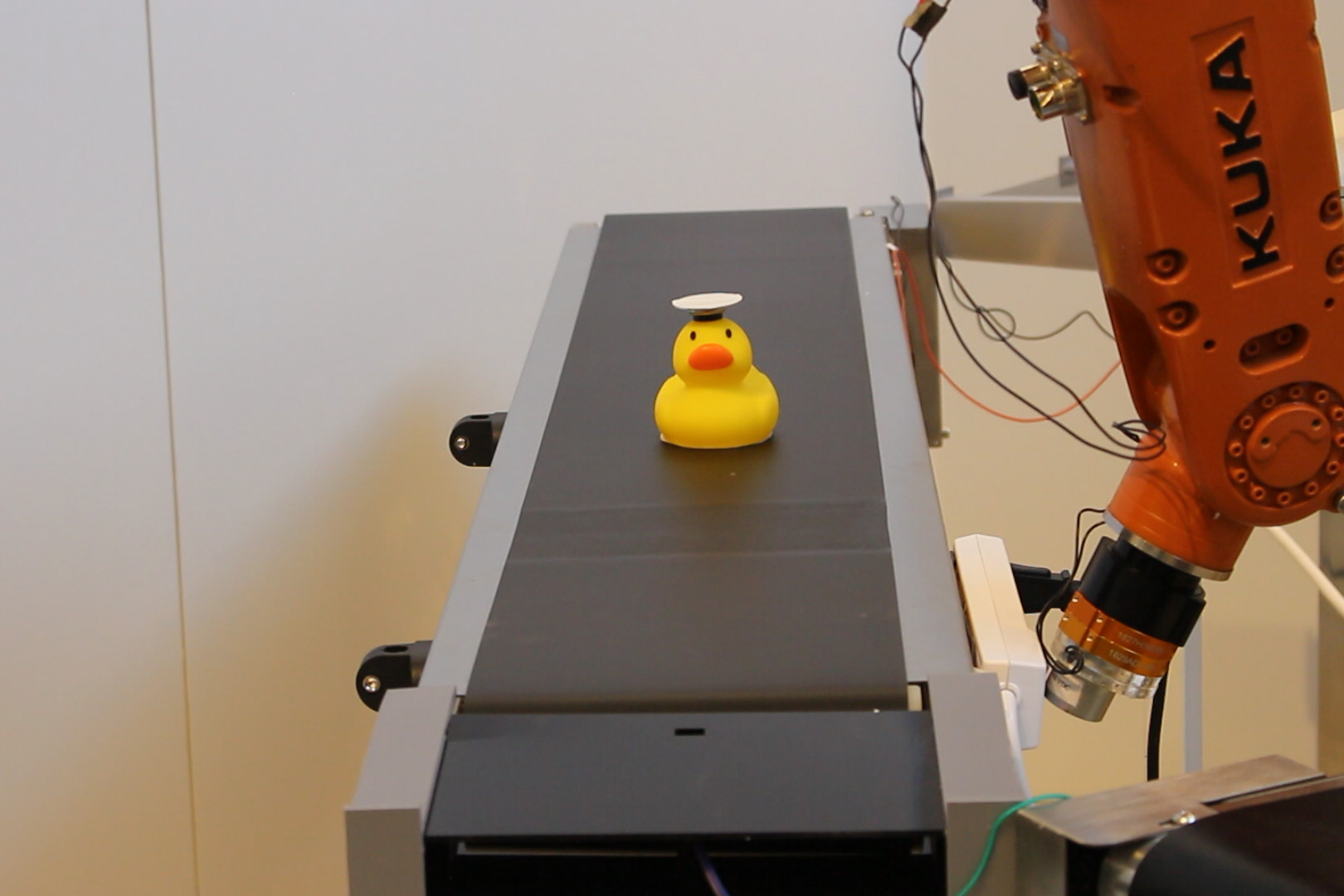
An industrial robot arm modified with an electromagnet repeatedly places a rubber duck on a series of moving conveyor belts. The arm turns on and off the belts at the trigger of sensors which detect the position of the rubber duck. Large industrial machinery paired with a seemingly incongruous, ‘sillier’ object creates an absurd, humorous system.
The work is driven by the desire to play in typically inappropriate spaces and use industrial objects as toys. While the robot arm is programmed to repeat a task that appears redundant, it performs with the same precision and delicacy as any industrial function.
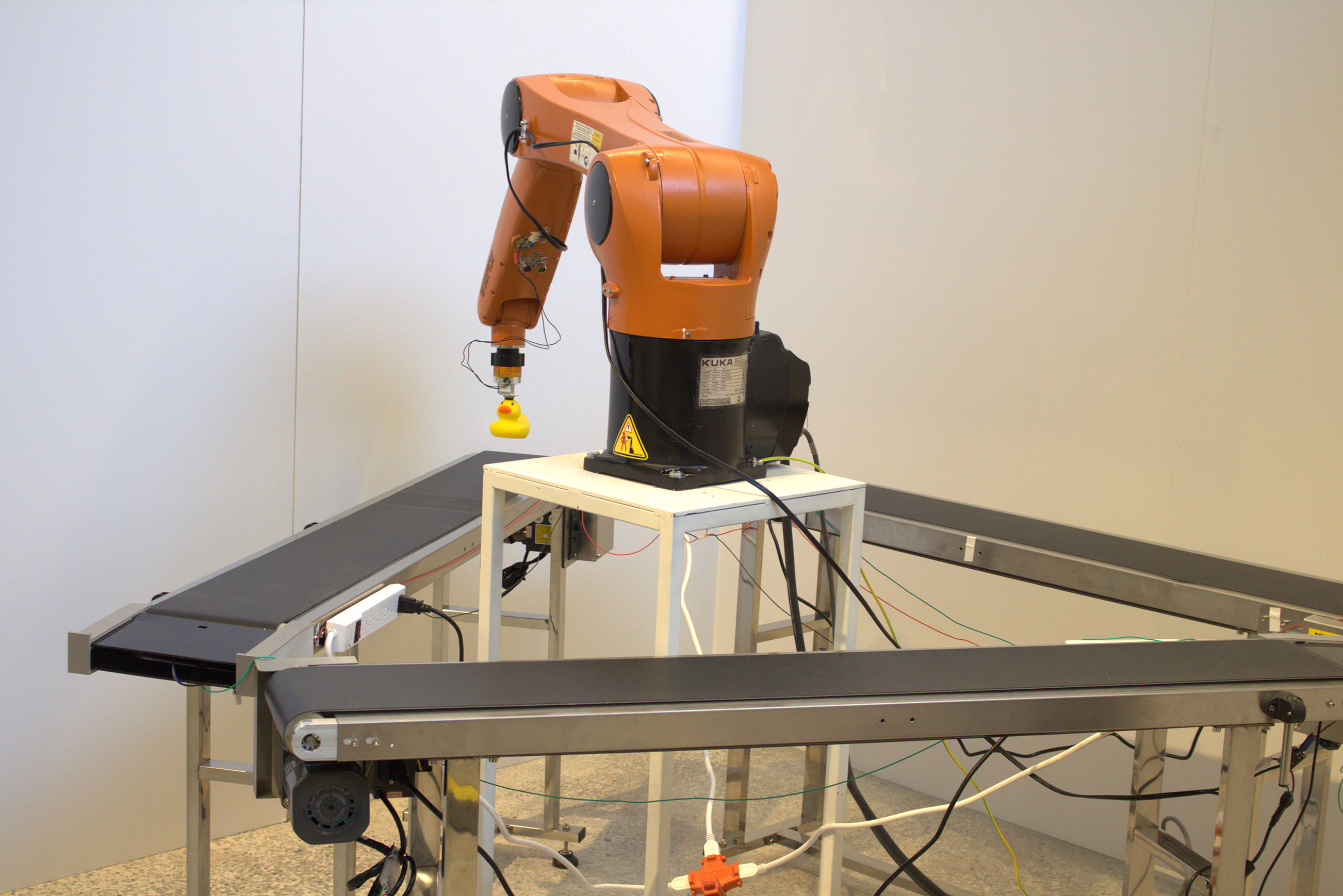

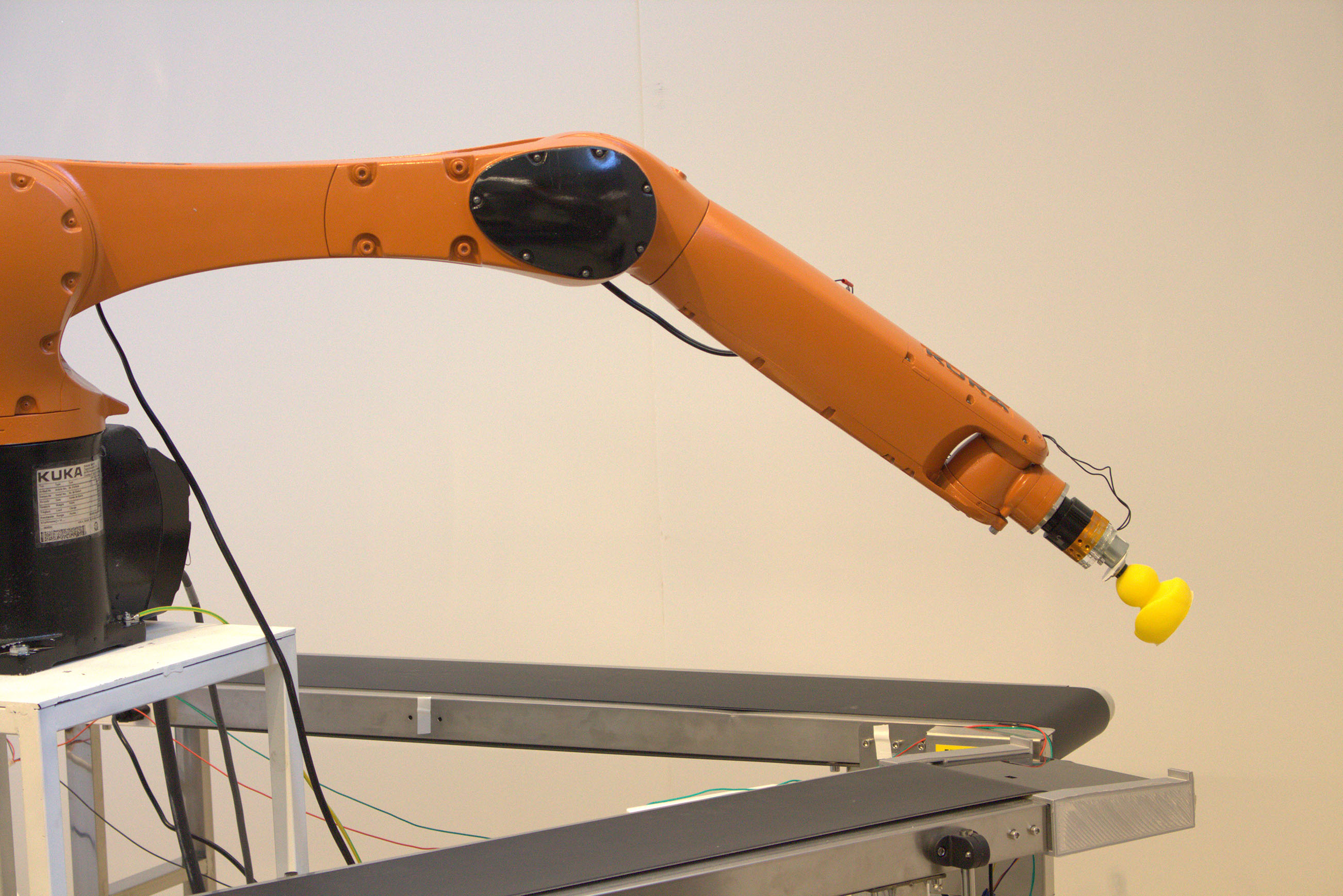
6-Axis Articulated Robot (KUKA KR 10), conveyor belts, rubber duck